ESP能对转向不足和转向过度做出反应。在没有进行直接的转向时,也必须能改变方向。
无ESP的车辆
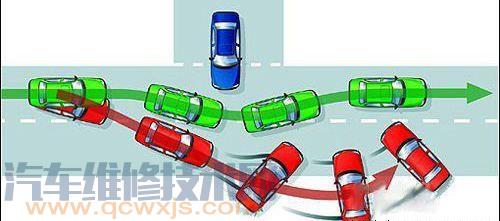
车辆必须避开突然出现的障碍物。驾驶员先快速左转,然后直接右转。
")
车辆由于突然的转向运动产生了甩尾,驾驶员不能再控制急转的车辆。
")
有ESP的车辆遇到这种情况会怎样
车辆要避开障碍物。根据传感器测得的数据,ESP知道,车辆处于不稳定状态。系统算出处理方法:ESP对左后轮实施制动,这样就支持了车辆的旋转运动,前轮依旧保持有侧向力。
")
车辆向左偏转行驶时,驾驶员向右转向,为了支持这个转向动作,右前轮被制动,后轮自由滚动,以保证后轴有最佳侧向力。
")
前面提到过的车道变化会导致车辆激转,为了防止甩尾,左前轮要制动。在特别紧急的情况下,车轮被紧急制动,以限制前轴的侧向力。
")
等所有的不稳定行驶状态被纠正后,ESP的调节作用就结束了。
")
ESP系统结构及其部件
")
ESP系统控制原理
")
转速传感器不断提供每只车轮的转速数据。转向盘转角传感器将它得到的数据直接通过CAN-总线传给控制单元。由这两种信息控制单元算出车辆的所需转向和所需行驶行为。
横向加速度传感器向控制单元传送侧向的偏转信息。角速度传感器传送车辆的离心趋势。从两种信息控制器算出车辆的实际状态。
如算出的所需值和实际值有偏差,控制系统进行调节。
")
ESP决定:
-哪只轮子应制动或加速
-发动机力矩是否该减小
-在自动变速车辆上是否需要使用变速器控制单元
然后根据传感器传输的数据,系统检查调节作用是否有成效。如果有成效,则ESP停止工作,并继续观察车辆的运行状态。如果没有成效,则调节系统重新工作。调节系统工作时,ESP信号灯亮,提示驾驶员注意。