转矩传感器
亦称转向传感器,其作用是通过测定转向盘与转向器之间的相对转矩,作为电动助力的依据之一。
转矩传感器的基本工作原理,如图12-69所示。
部件结构及工作原理")
图12-69转矩传感器原理
a)结构图;b)原理图
用磁性材料制成的定子和转子可以形成闭合的磁路,线圈A、B、C、D分别绕在极靴上,形成一个桥式回路。转向盘杆扭转变形的扭转角与转矩成正比,所以只要测定杆的扭转角,就可间接地知道转向力的大小。
在线圈的U、T两端施加连续的脉冲电压信号Ui,当转向杆上的转矩为零时,定子与转子的相对转角也为零。这时转子的纵向对称面处于定子AC、BD的对称平面上,每个极靴上的磁通量是相同的。电桥平衡,V、W两端的电位差U0=0。
如果转向杆上存在转矩时,定子与转子的相对转角不为零,此时转子与定子间产生角位移θ。极靴A、D间的磁阻增加,B、C间的磁阻减小,各个极靴的磁阻产生差别,电桥失去平衡,在V、W两端产生电位差。这个电位差与杆的扭转角θ和输入电压Ui成比例,从而可知道转向盘杆的转矩。
一种实际应用的转矩传感器结构如图12-70所示,其工作原理与上基本相同,优点是便于安装。
部件结构及工作原理")
图12-70实际应用的转矩传感器
1-检测环;2-检测线圈;3-输入轴;4-输出轴
日本富士重工电动动力转向系统用转矩传感器,是将负载力矩引起的扭杆扭转角位移测出,并转换为电位计电阻的变化。转子上产生的电信号经滑环由定子传递出来,其结构如图12-71所示。
部件结构及工作原理")
图12-71日本富士重工电子控制电动转向系统用转矩传感器
1-轴;2-扭杆;3-输出端;4-外壳;5-电位计;6-转向器主动齿轮;7-滑环
提示:车速传感器的结构和工作原理参考自动变速器部分。
电动机、离合器与减速机构
电动机、离合器和减速机构组成的整体称为电机组件,其结构如图12-72所示。
部件结构及工作原理")
图12-72 电机组件
1-电磁离合器;2-涡轮;3-斜齿轮
1)电动机
转向助力电动机就是一般的永磁电动机(原理不再叙述),电动机的输出转矩控制是通过控制其输入电流来实现,而电动机的正转和反转则是由电子控制单元(ECU)输出的正反转触发脉冲控制。图12-73是一种比较简单适用的正反转控制电路。
部件结构及工作原理")
图12-73 电动机正反转控制电路
a1、a2为触发信号端。从电子控制器得到的直流信号输入到a1、a2端,用以触发电动机产生正反转。当a1端得到输入信号时,晶体管T3导通,T2管得到基极电流而导通,电流经T2管的发射极和集电极、电动机M、T3管的集电极和发射极搭铁,电动机有电流通过而正转。当a2端得到输入信号时,晶体管T4导通,T1管得到基极电流而导通,电流经过T1管的发射极和集电极,电动机M、T4管的集电极和发射极搭铁,电动机有反向电流通过而反转。控制触发信号端的电流大小,就可以控制电动机通过电流的大小。
2)离合器
一般使用干式单片电磁离合器,如图12-74所示。工作电压为DC12V,额定转速时传递的转矩为15 N·m,线圈电阻(20℃时)为19.5Ω。
部件结构及工作原理")
图12-74 电磁离合器工作原理
1-滑环;2-线圈;3-压板;4-花键;5-从动轴;6-主动轮;7-滚珠轴承
其工作原理是:当电流通过滑环进入离合器线圈时,主动轮产生电磁吸力,带花键的压板被吸引与主动轮压紧,电动机的动力经过轴、主动轮、压板、花键、从动轴传给执行机构。
该离合器什么时候结合?什么时候分离?
提示:由于转向助力的工作范围限定在一速度区域内,所以离合器一般设定一个速度范围,如当车速超过30km/h时,离合器便分离,电动机也停止工作,这时就没有转向助力的作用。当电动机停止工作时,为了不使电动机及离合器的惯性影响转向系的工作,离合器也应及时分离,以切断辅助动力。当系统中电动机等发生故障时,离合器会自动分离,这是仍可恢复手动控制转向。
3)减速机构
目前使用的减速机构有多种组合方式,一般采用涡轮蜗杆与转向轴驱动组合式;也有的采用两级行星齿轮与传动齿轮组合式,如图12-75所示;图12-72是涡轮与斜齿轮组合方式。涡轮与固定在转向柱输出轴上的斜齿轮相啮合,它把电机的回转运动减速后传递到输出轴上。为了抑制噪声和提高耐久性,减速机构中的齿轮有的采用特殊齿形,有的采用树脂材料制成。
部件结构及工作原理")
图17-75 双级行星齿轮减速机构
1-转向力矩传感器;2-转轴;3-扭力杆;4-输入轴;5-电动机与离合器;6-行星小齿轮A;7-太阳轮;8-行星小齿轮B;9-驱动小齿轮;10-齿圈B;11-齿圈A
3.控制装置与控制逻辑
电动动力转向的控制系统如图12-76所示。该系统的核心是一个有4K ROM和256RAM的8位微机。
部件结构及工作原理")
图12-76 电动动力转向的控制系统
转向盘转矩信号和车速信号经过输入接口送入微机,随着车速的升高,微机控制相应地降低助力电动机电流,以减少助力转矩。发动机转速信号也被送入微机,当发动机处于怠速时,由于供电不足,助力电动机和离合器不工作。因此,EPS工作时,EPS ECU必须控制发动机处于高怠速工作状态。
点火开关的通断(ON/OFF)信号经A/D转换接口送入微机。当点火开关断开时,电动机和离合器不能进入工作。微机输出控制指令经D/A转换接口送入电动机和离合器的驱动放大电路中,控制电动机的旋转转向和离合器的离合。电动机的电流经驱动放大回路、电流表A、A/D转换接口反馈给微机,即电动机的实际电流与按微机指令应给的电流相比较,调节电动机的实际电流,使两者接近一致。
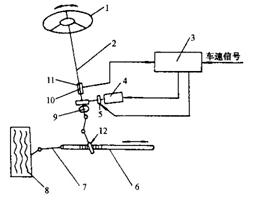
至此,电动动力转向系统已有了基本的认识,但似乎还不直观和现实,一种实际应用的电动动力转向系统如图12-77所示,该系统应用于三菱“米尼卡”车。其控制系统简图如图12-78所示。
部件结构及工作原理")
图12-77 三菱“米尼卡”车电动动力转向系统的结构原理
1-车速传感器;2-速度表引出电缆的部位;3-传动轴;4-车速信号(主);5-车速信号(副);6-电子控制器;7-副驾驶员脚下部位;8-电动机;9-扭杆;10-齿条;11-点火电源;12-蓄电池;13-发电信号;14-指示灯电流;15-提高怠速电流;16-电动机电流;17-离合器电流;18-转矩信号(主);19-转矩信号(副);20-离合器;21-电动机齿轮;22-传动齿轮;23-小齿轮;24-点火开关;25-熔断丝;26-转矩传感器;27-转向器齿轮总成;28-交流发电机(L端子);29-指示灯;30-怠速提高电磁法;31-发动机电子控制器;32-电动机与离合器
部件结构及工作原理")
图三菱“米尼卡”微型车电动式EPS电子控制系统
由图12-77和12-78可知:交流发电机的“L”端子可视为向电子控制器输入信号的一个传感器,利用交流发电机的“L”端子电压可以判断发动机是否转动。当发动机还未发动时,该系统不能工作。
电动机和离合器接受电子控制器输出的控制电流,产生助力转矩,经传动齿轮减速后,再经过小齿轮实现动力转向,电动机的动力是通过行星齿轮机构传递的。离合器是由电磁铁和弹簧等组成的电磁离合器。
当点火开关接通时,电源加于EPS电子控制器上,电动助力转向系统才能进行工作。在发动机已被起动时,交流发电机的L端子的电压加到电子控制器上。当检测到发动机处于起动状态时,动力转向系统转为工作状态。
行车时,电子控制器按不同车速下的转向盘转矩,控制电动机的电流,并完成电子控制转向和普通转向控制之间的转换。当车速高于30km/h时,则转换成普通的转向控制,电子控制器没有离合器信号和电动机电流输出,离合器处于分离状态。当车速低于27km/h时,EPS电子控制器又输出离合器信号和电动机电流,普通转向控制又转换为动力转向的工作方式。
EPS电子控制器还具有自我修正的控制功能。当电动助力转向系统出现故障时,可自动断开电动机的输出电流,恢复到通常的转向功能;同时速度表内的EPS报警灯点亮,以通知驾驶员,动力转向系统发生故障。
小结:
电动式动力转向系统是电子控制动力转向系的一种形式,其主要由转矩传感器、车速传感器、电动机、电磁离合器和减速机构、电子控制器组成。
该系统在其设定车速(27km/h)以下时,变为电动助力转向工作模式,车速越低,助力电动机的电流越大;当车速高于30km/h时,则转换成普通的转向控制(不起助力作用);
当系统出现故障时,可自动断开电动机的输出电流,恢复到通常的转向功能;同时速度表内的EPS报警灯点亮,以提醒驾驶员。