小鹏p5自适应巡航 ACC
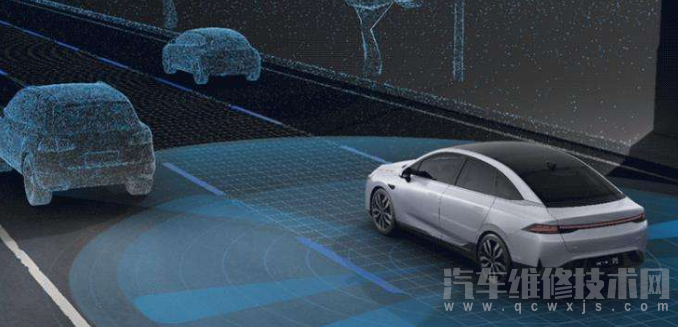
ACC 是一项舒适性的驾驶辅助功能。如车辆前方畅通,ACC 将以设定的最大巡航车速向前行驶。如检测到前方有车辆,ACC 将根据需求自动降低车速,与前车保持基于选定时间的距离,直至达到合适的巡航车速。
ACC 启用时,驾驶员仍需观察前方路况并在必要时施加制动。
ACC 主要用于高速公路等干燥的直路上行驶。在城市街道上不应使用 ACC。
操作自适应巡航 ACC
车辆 Ready 后,除非探测到前方有车辆,否则必须在自车速度高于 15km/h 才能启用 ACC。如果探测到前方有车辆,则可在任何车速下启用 ACC,即使静止状态也可以,但与前车的距离至少为 2m。
最低设定速度为 30km/h,最高设定速度为 120km/h。驾驶员有责任根据道路状况和车速限制设定安全的车速巡航。
")
当组合仪表显示灰色的指示灯") 时,表示可以使用 ACC,但尚未激活。
时,表示可以使用 ACC,但尚未激活。
")
在这种状态下,自适应巡航系统准备就绪,将换挡杆向下拨动到底一次(即 XPILOT 挡位),然后松开,即可启用 ACC 功能。
ACC 激活后,系统会辅助驾驶员控制车辆速度,由ACC 保持设定的车速。未检测到前方车辆时,ACC会以设定车速行驶。如检测到前方车辆,ACC 会根据需要提速或降速,在设定的车速下保持预选的跟车距离。
ACC 还会在驶入和驶出弯道时适当调节车速。
ACC 以设定的车速行驶时,可以随时进行加速。加速完成后松开加速踏板,车辆将返回到设定的车速。跟车时,ACC 在低速行驶时仍保持可用,前方车辆停止后,ACC 会控制本车跟随停止。当前方车辆再次行驶后,ACC 会以当前设定的车速恢复工作。
在以下情况下,ACC 将进入保持状态而不会恢复,组合仪表会显示提示信息,提示驾驶员需要恢复巡航控制:
1.停驶时间达到 90s。
2.超声波传感器探测到车辆前方有较近的障碍物或行人。
3.车辆突然检测不到被跟随的前车。
要恢复 ACC 巡航,请踩下加速踏板。
调节跟车距离
")
短按方向盘左侧区域的车距循环按键,可循环切换车距挡位,正向调节的跟车车距共有三挡,调节至 3 档后再次按压则回归 1 挡。每个挡位
对应一个基于时间的距离,其中基于时间的距离表示车辆从当前位置到达前车尾部所需的时间。
系统将对驾驶员的跟车距离设置进行记忆,每次车辆重新 Ready 后,默认为上一次设置的跟车距离。
")
短按方向盘左侧区域车距循环按键时,组合仪表可显示当前设置。
ACC 主动降低车速以便与前车保持选定距离时,刹车灯亮起,提醒其它道路使用者您正在减速。当ACC 在控制车辆加速时,加速踏板不会动。
调节最大巡航车速
")
使用自适应巡航(ACC)时更改设定车速,需要滑动方向盘左侧滚轮。
缓慢滚动滚轮时,巡航设定车速变化 1km/h,向上滚动为加,向下滚动为减。
快速滚动滚轮时,巡航设定车速变化 1km/h,向上滚动为加,向下滚动为减。
如果车辆未检测到前方有行驶速度比设定车速低的车辆,可能需要数秒钟时间才能达到新的巡航速度。
取消和恢复自适应巡航 ACC
")
短按方向盘左侧的取消键或踩下制动踏板,可取消自适应巡航(ACC),组合仪表上的自适应巡航指示灯变成灰色或者消失,表示自适应巡
航(ACC)并未控制车速。
在一个驾驶周期内,使用过自适应巡航(ACC)后,在自适应巡航指示灯为灰色时,可短按方向盘左侧的取消键来按照上一次的巡航车速恢复自适应巡航(ACC)。
驾驶员需要及时响应接管车辆的请求
当自适应巡航(ACC)需要驾驶员接管车辆时,会通过组合仪表向驾驶员发出接管请求提示,同时发出接管提示警告音。
当组合仪表显示 “立即接管”等请求字样时,驾驶员应立即接管车辆,控制车辆速度,避免危险的发生。
如果驾驶员已经发现了危险,切勿等待接管请求发出后再接管车辆,请立即接管车辆。
ACC 取消时,能量回收制动会使车辆减速,减速方式与无 ACC 时松开加速踏板来降低车速相同。